作業が目的ではない“パートナー”としてのロボットを
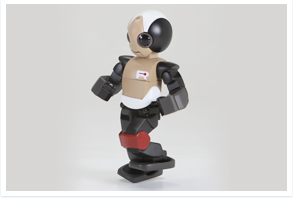 |
| 躍動感ある動作を特徴とする『ROPID(ロピッド)』 |
 |
| ロボット宇宙飛行士『KIROBO(キロボ)』 KIBO ROBOT PROJECT事務局提供 |
私が製作しているのは“自分が欲しいロボット”です。幼少期に憧れた鉄腕アトムの影響も大きいです。そばにいてくれて、カッコ良くてカワイイ相棒で、人と機械、両方の魅力を持っていること。機械っぽくなり過ぎてしまうと無機質だし、アンドロイドでは人間過ぎて違和感がある。ですから、両者の中間を狙っています。
人間のフォルムのロボットは、作業をするうえでは効率が悪い。にもかかわらず、人は自分たちと同じような形を作りたがる。それは生き物っぽい、つまり命を感じられるからだと思うのです。自然にコミュニケーションをとろうと思う、共存したいと感じる姿が人型。何か人の代わりに作業させるためでなく、一緒に暮らす仲間として、私はロボットを提案しています。
毎回、新しい挑戦や試みを盛り込み、具現化するのが私のロボット作りです。たとえば2009年に発表した『ロピッド』は、ジャンプしたり走ったりすることが可能です。それによってまるで走り回る子どものような躍動感を実現したかった。その為に、脚部の新しい機構を考案し、その部品も苦労しながら自作しました。また、そうしたオリジナルのロボットを開発して発表していると、商品化の話も舞い込んできます。量産には量産するうえでの制約もありますが、新規に専用のモータなどの部品をオーダーすることができ、ロボット自体の基本性能が一段向上します。例えばそうやってコミュニケーションロボット『ロビ』が誕生したのです。
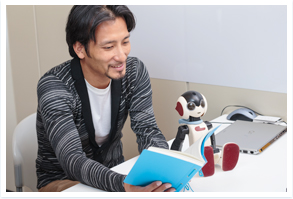
『ロビ』自体、人感センサーや音声認識、二足歩行など、多くのハイテクが導入されていて、会話をしたり、テレビを操作したり、防犯機能があったりしますが、実用性は重視していません。コミュニケーションロボットに触れて、魅力を知る。将来本格的なロボットが家庭に溶け込んでいく前段階として良い導入になるのでは、と期待しています。
ロボットとの生活に現実味を持たせる代表作『ロビ』
近年急激に普及した掃除ロボット、『ルンバ』(米国・アイロボット社)。しかし、初代モデルはもっと安価な玩具として売られていました。いわば手軽なジョークグッズとして、実用性を期待されない商品だったのです。そして使ってみると意外にゴミが取れることに購入者が気付いた頃に、高額な本格的なモデルを投入しました。事前に玩具のフリをしてうまく消費者を啓蒙したことが、掃除ロボット普及の鍵だったのです。
デアゴスティーニ社から発売されている『ロビ』は、雑誌の付録として順次提供されるパーツを組み立てていくと1体のロボットができ上がるというもの。試しに数号買ってみて、難しすぎたら、面白くなかったら辞めれば良いと、気楽に始められる販売方法です。一度に大量の部品が届かないのも良い点で、コツコツ組み立てていくと最終的に高度な物ができ上がる。結果、創刊号は13万部販売され、予想を大きく超える大ヒット商品になりました。今後、『ロビ』をきっかけに、本格的なコミュニケーションロボットの普及が進むと考えています。
そういえば、公文式も少しずつの学習の蓄積が大切ですよね。わんこそばではないですが、大きな器でフゥフゥ言いながらようやく食べきるより、一杯ずつ積み重ねていく感覚でこなせるほうが、楽しみにも繋がりやすく、無意識のうちに大きな成果が得られると感じています。
10年後にはロボットがスマホ代わりになるかも?

ロボットを取り巻く環境は2013年に入って大きく変わりました。シリコンバレーをはじめ、世界的な流れとして、ITに続く革新はロボットだろうといううねりが起きています。この10年、様々なサービスや製品がパソコン等の画面内で完結するようになり、場所を取り、メンテナンス等維持費が掛かり、自動アップデートができないような実体のある機械製品を所有することは合理的ではないと考えられてきました。例えばCDを買って音楽を楽しむ代わりに、音楽データをダウンロードするようになり、更にはデータすら所有しないで随時ネット上のデータにアクセスするようになりました。しかし、今やどんな美しいコンピューターグラフィックス映像を見ても感動しなくなり、どんな便利なアプリにもお金を払おうと思わなくなってきています。我々はバーチャルな世界での出来事に急速に興味を失いつつあります。そして、代わりに、実体のある物を個人で所有し、愛着を持って長期間使用したいと思うようになってきたのです。そんなバーチャルからリアルへの揺り戻しが世界的に起きていて、それが昨今の3Dプリンタを使ったメイカーズブームや、ロボット分野への参入につながっているのです。
かつて日本にも何度かロボットブームが起きました。しかしどれも万博開催等、国内の事情からでした。そこで開発されるのは、巨大で無骨な、とても身近に感じられないようなロボットばかり。ところが昨今のスマートフォン(以下「スマホ」と表記)の普及により、小型の情報端末を携帯し続ける習慣が根付き、機械と人の距離は急接近しました。ただ、スマホにも限界が見えてきています。アップルを筆頭に少数の企業が消耗戦を繰り広げる状態で、すでに各社は次の形を模索中です。
例えばiPhoneが成功した理由には、より使いやすくしたインターフェースがあり、その象徴がタッチパネルです。そして、次世代のインターフェースとして期待されていたのが、精度の高い音声認識機能です。しかし実際には音声認識はあまり活用されていません。なぜなら、このような四角い箱に話しかけることに心理的な抵抗感があるからでしょう。一方で我々はペットの金魚やカメ、クマのぬいぐるみにすら話しかけたりします。なので、音声認識を搭載し、人のような外観や動きを持った小型ロボットが実現すれば、人は自然に会話をすることができるはずなのです。5年前であれば、そのような会話は暇つぶしや癒しくらいの意味しかありませんでした。ところが今の時代、会話をすること自体に大きな価値があります。現在、ほとんどのITサービスが利用者の好みやライフスタイルといった情報を収集し、それに合わせた情報や商品の提案をおこなっています。ロボットとの日常的な会話によって、より良質な情報を収集し、より精度の高いサービスを返してくれるようになるでしょう。
そんなヒューマノイドロボット普及に必要なのはデザインです。外観のみならず、動きや発話内容、サイズなど、全てのデザインをバランス良く整える必要があります。現在既にそんな情報端末としての小型ヒューマノイドロボットを発売すべく、大規模プロジェクトを進めています。きっと10年以内に1人1台の時代が実現すると考えられ、それはひょっとすると更に早まるのではないかとすら感じています。